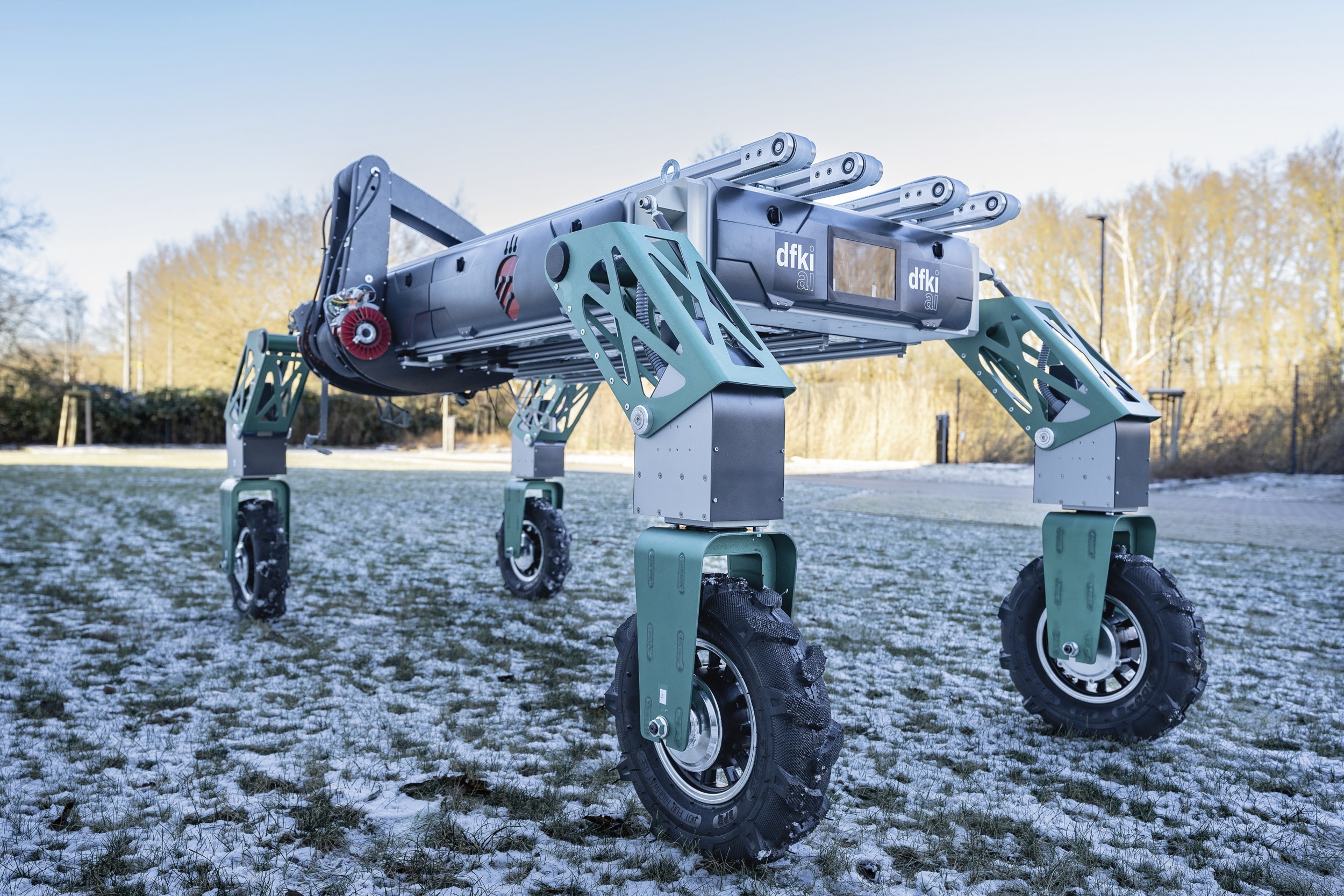
Wird erstmals auf der Grünen Woche der Öffentlichkeit präsentiert. Der Erdbeerpflückroboter des DFKI ... Annemarie Popp
DFKI
Landwirtschaftliche Betriebe, wie der im Projekt assoziierte Erdbeerhof Glantz, beklagten einen Rückgang von Saisonarbeitskräften auf der einen sowie gestiegene Löhne auf der anderen Seite, sagt DFKI-Projektleiter Heiner Peters: «Hier setzt unser Roboter an. Er soll die Helfenden bei der Ernte unterstützen und sie entlasten. Er kann bei Bedarf parallel arbeiten oder auch nachts eingesetzt werden.»
Das System ermöglicht gemäss den Forschenden eine kostengünstige Automatisierung in der Landwirtschaft. Auf grösseren Feldern ist der Einsatz mehrerer Roboter denkbar. Die technischen Komponenten des Erdbeerpflückroboters sind eine mobile Plattform, ein Fruchterkennungssystem und ein Erntegreifer. Mithilfe Künstlicher Intelligenz (KI) erkennt der Roboter, welche Früchte reif genug sind, gepflückt zu werden. Potenziell lässt sich diese KI-Methodik auch auf andere Obstsorten übertragen.
Auf der Grünen Woche in Berlin von Ende Januar wurde das System mit nur einem Greifarm gezeigt, langfristig sind auf beiden Seiten Greifer geplant. Eine der Herausforderungen für die Forschenden liegt darin, die Roboterarme in die Lage zu versetzen, einerseits reife Erdbeeren sauber vom Stil zu trennen, sie andererseits dabei aber nicht zu zerdrücken. Diese Probleme werden im Projekt derzeit adressiert. Peters: «Unser Ziel ist es, zum Projektende mit jedem Greifer in sechs Sekunden eine Erdbeere zu pflücken, also insgesamt alle drei Sekunden eine. Das entspricht in etwa der menschlichen Pflückleistung.»
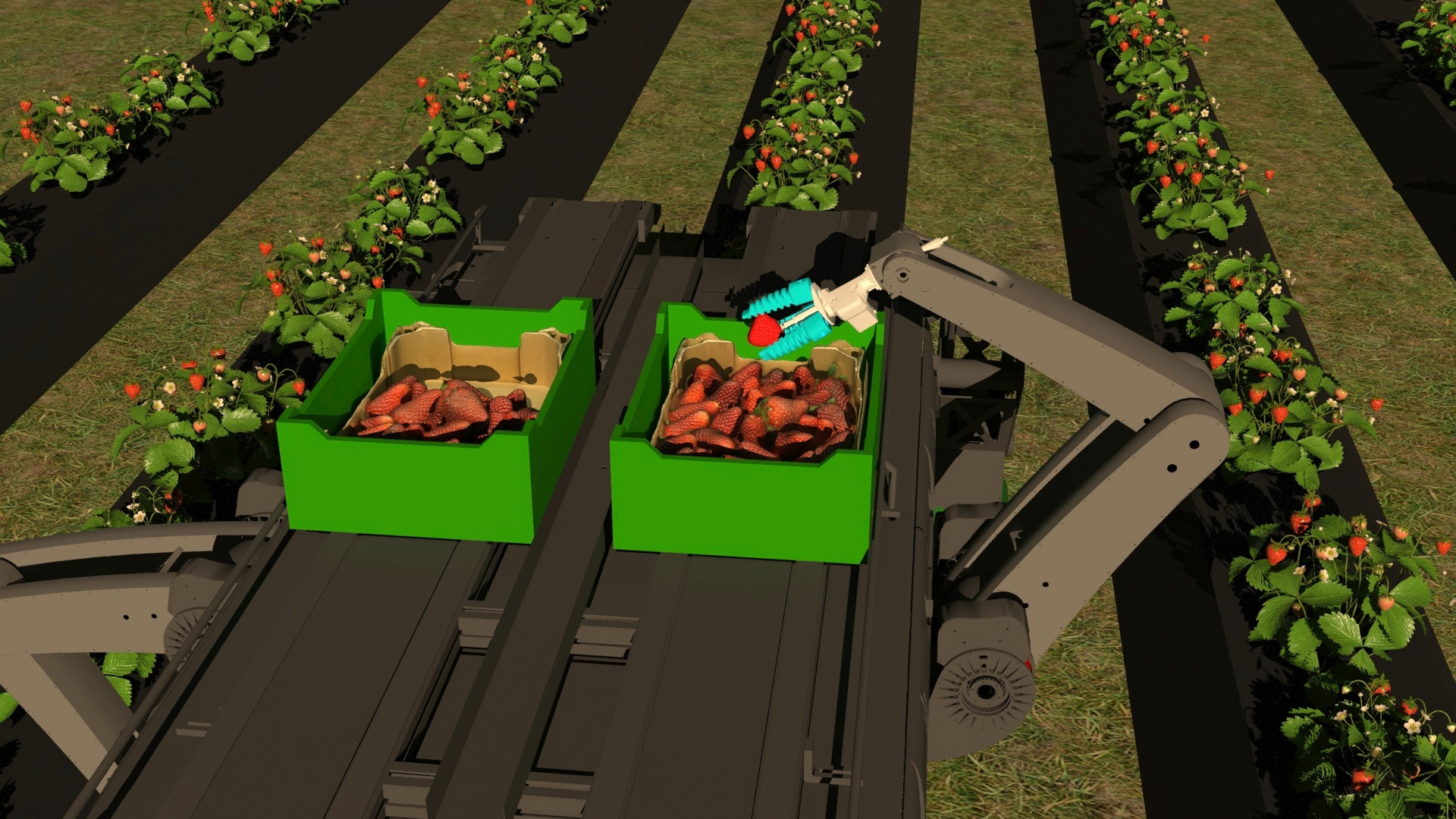
Die Animation zeigt, wie der Erdbeerpflückroboter am Ende arbeiten soll. Zwei Arme greifen alle drei Sekunden eine Erdbeere.
DFKI

